極限環境ロボット研究所
これまでにないロボットを実用化し、
極限環境下での課題解決に貢献
極限環境ロボット研究所[HERO Lab.]は、福島第一原発のような人が立ち入れない環境で活躍できる廃炉用ロボットなどの研究開発を目的とした組織です。東京電力グループの白山工業が、IEEE Robotics & Automation SocietyのPioneer in Robotics and Automation Awardの第1回受賞者である「広瀬茂男」東京工業大学名誉教授を所長に迎え、2020年に創設しました。世界中でまだ誰も解法を知らない、著しく困難で多様な問題を、創造的ロボット開発によって解決し社会に貢献していきます。
HERO Lab.が目指すもの
- 1福島第一原発の廃炉作業遂行に必要な多様な廃炉用ロボット開発を、東電グループの一員として主体的にチャレンジします。
- 2東電グループの電力事業には、大型インフラの維持補修を行うロボットや、それを行う作業者のアシスト機器が必要であるため、これらの機器開発も積極的に取り組みます。
- 3これらに限定されず、例えば白山工業が提供している光学式地震センサを用いた「光センサ地震計測システム」や、マスクを着けた時の呼吸を楽にする「HEROインナーマスク」など、社会に役立ちそうな装置を自由に発想し積極的に開発を進めます。
- 4HERO Lab.はアカデミアとの連携を重視し、研究開発の成果を積極的に学会発表していきます。


新着情報
- 2026.07.10
- 2026.07.08
極限環境ロボット研究所のメンバーが日本機械学会の「2026年度ロボティクス・メカトロニクス部門表彰」を受賞しました
- 2026.05.26
東京パワーテクノロジー株式会社(当社の業務資本提携先)のnote記事にて、極限環境ロボット研究所の取り組みが紹介されました
- 2026.05.18
- 2026.04.27
- 2026.03.11
日本地震学会強震動委員会 第46回研究会(3/13)に当社理事の平山義治が登壇します
(題目:位相シフト光干渉法による3成分振動観測システム) - 2025.11.26
- 2025.11.26
- 2025.10.06
- 2025.10.02
海洋開発国際セミナーにて、日本財団―DeepStar連携技術開発助成プログラムの進行状況として、弊社の成果を発表しました
- 2025.09.12
- 2025.09.10
- 2025.09.09
- 2025.09.04
- 2025.08.22
- 2025.08.07
国際学術誌「Bulletin of the Seismological Society of America (BSSA)」に、弊社顧問 堀内茂木の論文が掲載されました
- 2025.07.20
- 2025.07.03
- 2025.06.05
極限環境ロボット研究所の西田が日本機械学会の「2025年度ロボティクス・メカトロニクス部門ベストデモンストレーション表彰」を受賞しました
- 2025.05.12
47ニュースの大阪・関西万博の赤十字・赤新月スペシャルデーの動画記事で、極限環境ロボット研究所の「NekoQ」が紹介されました
- 2025.04.23
大阪・関西万博の赤十字ウィーク(5/4〜10、万博会場内ギャラリーWEST)にHERO Lab.で開発したロボット「KUROKO Crane Balancer」「NekoQ」を出展します
- 2025.04.03
第158回 機械特性が変化する「可変」ロボットの仕組みとその応用事例(5/29)に極限環境ロボット研究所 所長の広瀬茂男が登壇します
- 2025.01.30
- 2025.01.09
読売新聞夕刊科学面の記事で、極限環境ロボット研究所 所長広瀬茂男の開発したヘビ型ロボットが紹介されました
- 2024.11.21
- 2024.10.31
- 2024.08.21
- 2024.07.16
- 2024.07.12
- 2024.06.11
- 2024.05.29
ロボティクス・メカトロニクス 講演会 2024 in Utsunomiya(5/30~31、ゴールドスポンサーとして協賛)に出展します
- 2024.05.27
- 2024.05.10
- 2024.04.22
Offshore Technology Conference (OTC) 2024(5/6~9、米国ヒューストン)に出展します(日本パビリオン内)
- 2023.12.01
- 2023.11.24
- 2023.10.30
- 2023.10.13
- 2023.09.14
- 2023.08.24
- 2023.08.04
- 2023.06.26
ロボティクス・メカトロニクス 講演会 2023 in Nagoya(6/29~30、ゴールドスポンサーとして協賛)に出展します
- 2023.06.12
日本財団-DeepStar連携技術開発助成プログラムに採択 ~光ハイブリッド型海底ケーブルによる海底常設型CCS貯留層モニタリングシステムの開発~
- 2023.04.19
- 2023.04.17
Offshore Technology Conference (OTC) 2023(5/1~4、米国ヒューストン)に出展します(日本パビリオン内)
- 2023.01.10
- 2022.10.26
ロボットの国際会議 IROS の公式メディア IROS TV に極限環境ロボット研究所 所長広瀬茂男のインタビューが掲載されました
- 2022.09.26
ロボットの国際会議 IROS(10/23~27、国立京都国際会館、プラチナスポンサーとして協賛・出展)に極限環境ロボット研究所 所長の広瀬茂男がスピーカーとして登壇します
- 2022.06.23
6月22日 極限環境ロボット研究所 所長 広瀬茂男による「第一回 ロボット機構創造開発セミナー」を開催しました
- 2022.05.30
- 2022.04.22
- 2022.03.29
東急ハンズの各店舗にて「HEROインナーマスク」の販売を開始しました(一部店舗を除く)
- 2022.02.25
- 2021.12.24
- 2021.10.26
- 2021.09.13
9月13日付 日本教育新聞にHEROインナーマスクの紹介記事が掲載されました
- 2021.09.10
- 2021.08.06
8月6日付 日刊工業新聞にHEROインナーマスクの記事が掲載されました
「マスクの息苦しさ軽減 ~白山工業が樹脂製グッズ~」 - 2021.06.25
- 2021.04.29
- 2021.02.01
- 2020.11.30
- 2020.08.28
拠点

極限環境ロボット研究所(HERO Lab.)
研究開発棟
〒141-0022
東京都品川区東五反田2-5-15 東和ビル
JR山手線/都営浅草線/東急池上線 「五反田町」駅 徒歩6分
JR山手線/JR埼京線/東京臨海高速鉄道 「大崎」駅 徒歩10分

極限環境ロボット研究所(HERO Lab.)
〒141-0032
東京都品川区大崎1-6-4 新大崎勧業ビルディング 7F・6F
JR山手線/JR埼京線/東京臨海高速鉄道 「大崎」駅 徒歩2分(駅より歩行者デッキで直結)

エントランス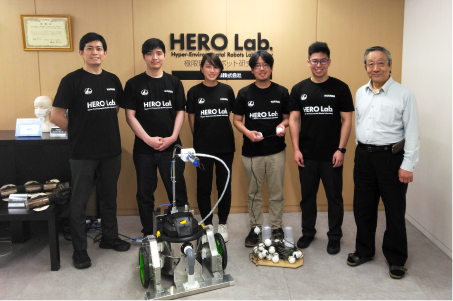
HERO Lab.のメンバー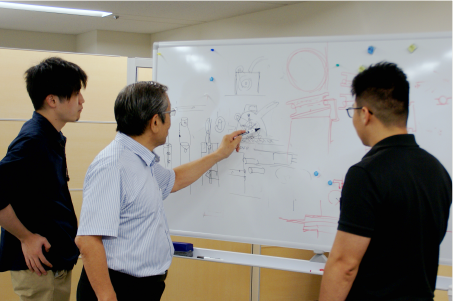
打ち合わせの様子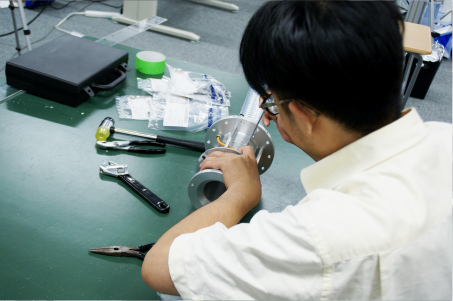
作業室
X(Twitter)
不織布マスク内の空気を整流し、息苦しさを軽減するマスク補助器具HEROインナーマスク
詳しく見る世界を驚かす独創的なロボット開発をしたい人は集まれ!
極限環境ロボット研究所
採用ページ研究開発
HAKUSANが大切にしている価値観「おもしろいモノをつくろう」。
この原点となる研究開発の取り組みについてご紹介します。