研究開発
ロボティクスと地震計測技術の融合を目指して
世界の地震防災に貢献する地震動シミュレーターの開発
 公開:2020年11月30日
公開:2020年11月30日
ふとしたアイデアから始まった大学との共同研究
白山工業はスリッターのメーカーとして1958年に創業しており、現在も防災システム事業と並んでメカノシステム事業を収益の柱としています。工場用の生産設備であるスリッターの製品価値を上げるため、早くからロボット工学など多分野の技術や知見を積極的に取り入れる活動を続けていました。可搬式地震動シミュレーター(地震ザブトン)は、そのような中で生まれた製品です。2007年度、東京工業大学・機械宇宙学科の広瀬茂男教授(当時/現在は弊社 極限環境ロボット研究所 所長)が発明されたコンパクトなクローラー方式の全方向移動機構(The Vuton)の活用方法について討議する中、「地震動を正確に再現して体験できる装置」というアイデアが出ました。The Vutonは車輪式の移動機構に比べて接地面積が大きく、高い推進力と耐荷重性能を実現でき、サーボ制御を用いて東西南北のどの方位にも自由に走行できるので、観測された地震動データを再現する上で最適な機構だと考えたのです。
2008年度には人が乗って実際の地震動を再現するのに適した設計のThe Vutonを東工大と開発する共同研究がスタートしました。
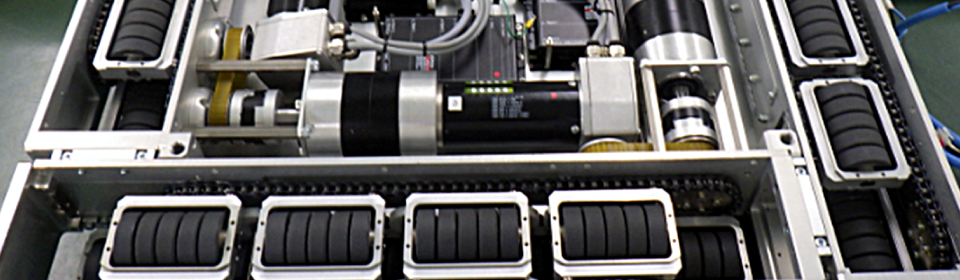
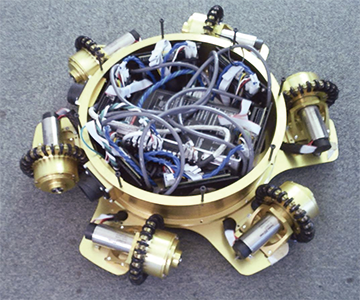
東工大のThe VUTON(当時)の動作
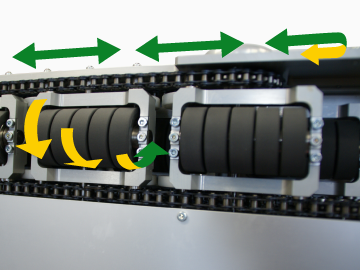
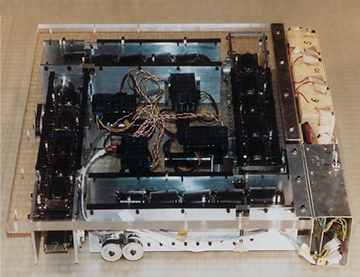 東京工業大学で生まれたThe VUTON
東京工業大学で生まれたThe VUTON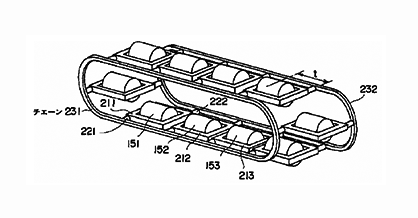 クローラーの原理的な構成を示す図
クローラーの原理的な構成を示す図
地震防災に携わる当社だからこそのこだわり
地震観測に携わる当社が地震体験装置を設計するにあたって、下記のような再現性能の目標を持って走行機構の設計を行いました。
- ・実際に観測された震度5強以上の地震波形をできるだけ正確に再現できること。
- ・海溝型地震の際に発生が懸念される長周期地震動を再現できること。
- ・地学現象である地震動(観測データ)に限らず、ビルの高層階の変形に伴う揺れ(応答シミュレーションデータ)なども取り込んで再現することができ、市民が実際に被災する様々なケースを模擬できること。
大学で開発された初期のVutonクローラーは比較的低速のものでしたが、地震動をきちんと再現するためには走行速度と、加速度の両方を適切に制御する必要があります。
例えば、長周期地震動は「ゆっくり揺れる」等と表現されますが、大きく振幅する超高層階の床応答値の速度は一般的な地震よりもむしろ大きくなる傾向があり、高速で走行できないと再現できません。一方で震度7に達するような大地震の再現には、ある程度以上の加速度で加速・減速を繰り返す必要があります。
高速での走行と加減速性能を両立し、なおかつ体験者の重量を載せてクローラー自身を十分動かせるトルクを発生させることは設計上トレードオフになりますので、様々な減速機構のレイアウトを検討して、3軸グラフ※上でカバーできる性能範囲(図参照)を確認し、地震動シミュレーターとして最も有用と考える性能に落とし込んでいます。
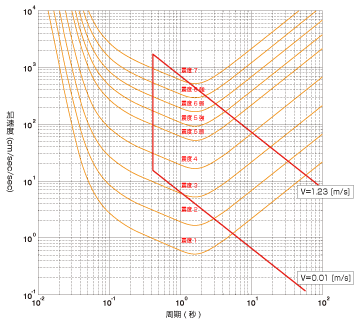
開発当初目指した性能目標(赤線内)
機械制御の観点から重ねた工夫
制御装置の開発にも独自の工夫があります。産業用途で多く使用される電動の無人搬送車(AGV)などの設計では、走行開始時のモーター加速と巡行走行に必要な電源装置とモーター駆動回路を選定・配置すればよく、減速は単に逆向きの加速動作となります。しかし、地震動シミュレーターは発生する加速度がAGVとは比較にならず、激しい加速・減速を絶え間なく100分の1秒単位で何回も繰り返します。そのため、加減速を繰り返す中、減速する瞬間にモーター電流が逆流する影響で電源装置が故障するというトラブルが起きました。走行車両ならばブレーキをつけるところですが、地震再現時の減速は加速度(減速度)を正確にコントロールするのであくまでサーボ制御で行う必要があります。この問題については、制御装置内のシャントレギュレータ回路と回生抵抗で余分な電流を熱として消費させて解決しました。
当時普及しはじめていたスーパーキャパシター(大容量コンデンサ)を並べたコンデンサバンクを制御装置に組み込んで、回生電流を蓄積して加速時に再利用するというハイブリッド車やエレベータで用いられている方式も検討しましたが、充放電のサイクルがあまりにも激しく、コンデンサの寿命が持たないと判断し、開発段階では断念しています。近年はEVの普及などでコンデンサの進歩が著しいので、いずれ地震ザブトンに搭載することも可能になるかもしれません。
- 激しい加減速を絶え間なく繰り返す様子
啓発・教育・研修など地震防災の現場で役立つために
制御装置は映像再現などの付加機能を含めて、すべて100Vの商用電源で動作可能な設計にしています。地震ザブトンの走行モーターは定格400W×4台で、これを瞬間的には数百%の出力で駆動させますが、地震ザブトンを運用する場所はオフィスの会議室やマンションのロビーなどであり、電源容量に限りがあるため電源装置の選定に工夫がもとめられたのです。
また、実際に観測された地震動データ(加速度値)を速度サーボによる走行制御に適したフィルタ処理をしたり、振動台で撮影した室内被害の映像コンテンツ作成や、体験できる地震メニューの作成においても、だれもが理解しやすいように編集しています。【東京工業大学・翠川研究室(当時)との共同研究】
これらは、製品化以前に様々な学会や自治体のイベントへ試作機を持参して運用した中で得られた課題に対して改良を反映したものであり、製品化された現在もそれは続けられています。まず作って現場に投入し改良を重ねる、当社が大切にするデザイン思考が体現されている好例です。
地震ザブトンに関連して開発したさまざまな機能や機構
地震ザブトン3D
現在製品化されている地震ザブトンは、水平方向(東西南北)いわゆる地震の横揺れのみを再現するものですが、実は垂直方向(上下)いわゆる縦揺れの再現機構の開発にも取り組んできました。【東京工業大学・広瀬研究室(当時)との共同研究】
これは地震ザブトン本体に固定された椅子を空気圧シリンダで上下させる機構で、空圧制御器(電空レギュレータ)を用いて地震動データに従った上下動を行うように設計されています。ただし、体験者にとってシートベルトで固定され、座ったまま激しく上下に、その後すぐ前後左右に揺すられるため首や腰への負担が大きく、安全上の理由でやむなく製品への搭載を断念しました。また、体験の都度空気を補充するために待機時間が長くなったり、設置器具が増え騒音も出るなど、運用面での課題も多くあります。
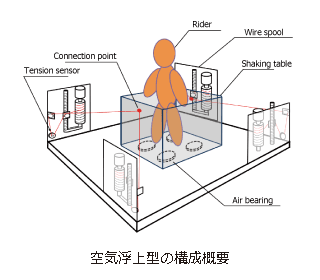
地震ザブトンair
一人乗りではなく複数人が乗れる、あるいは椅子ではなく立って体験もできるようにと、大型化を検討するための研究開発も大学と共同で行っていました。現行の地震ザブトンよりも一回り大きい(1300mm×1300mm)サイズです。VUTONクローラーに代えて空気浮上(エアベアリング)で装置全体をわずかに床から浮上させる機構です。四方向からワイヤーで引っ張り駆動させます。リアルタイムでワイヤー制御を行うサーボ式巻き取り機構と、地震動の再現を平面上で行うための制御アルゴリズムを開発しています。【東工大・武田研究室との共同研究】この技術は、当社の極限環境ロボット研究所で取り組む新しいロボットの開発に活かされています。
地震ザブトンmini
通常の地震ザブトンに比べ、より短周期の揺れを再現し、模型を載せて実験等に用いることを目的とした、直径500mmの円形で軽量な小型機です。走行機構はアルミ製のミニローラーを円周上に多数配置した6軸の駆動輪を新規開発し、動力と制御にはmaxon社製の高トルクモーターとサーボアンプを使用。試作機では5Hz以上の俊敏な揺れまで良好に再現でき、現在は高層ビルの模型を載せ、弊社の計測地震防災システムを説明するために使われています。【明治大学・加藤研究室 及び 東京工業大学・広瀬名誉教授(当時)との共同研究】
研究成果
学会発表・論文
- 論文「The VUTON: High payload high efficiency holonomic omni-directional vehicle」Proc. of 6th International Symposium on Robotics Research, pp. 253-260, 1993.
- 論文「全方向移動型可搬式地震動シミュレータ ”地震ザブトン”の開発」第27回 日本ロボット学会学術講演会, Sep. 2009.
- 論文「Development of Earthquake Experience System Using Ground Motion Simulator “Jishin the VUTON”」7CUEE, 317-320, 2010.
- 論文「Development of portable earthquake simulator for enlightenment of disaster preparedness」Proc. of 15th World Conf. on Earthquake Engineering, 2012.
- 論文「Development of the Portable Ground Motion Simulator of an Earthquake」Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 5339-5344, 2013.
- 論文「Conceptual Design of a Cable Driven Parallel Mechanism for Planar Earthquake Simulation」The 21st CISM-IFToMM Symposiumu on Robot Design, Dynamics and Control(ROMANSY2016), Springer, pp.403-411, 2016.
- 論文「Reproduction of Long-Period Ground Motion by Cable Driven Earthquake Simulator Based on Computed Torque Method」Proceedings of the 4th International Conference on Cable-Driven Parallel Robots, Springer, p415-424, 2019.
- 論文「捻じれ放射配置オムニホイルによる全方向移動機構を用いた可搬型地震動シミュレータ —高加速度を実現する駆動機構—」日本地震工学会論文集, Vol.19, No.7, p.56-66, 2019
- 論文「Offline Reference Trajectory Shaping for a Cable-Driven Earthquake Simulator Based on a Viscoelastic Cable Model」IEEE Robotics and Automation Letters, vol.7, no.2, pp.2415-2422, April 2022
- 紀要・報告「全方向移動車両機構を利用した従来にない地震体験装置」日本機械学会誌,Vol. 114, No. 1111, pp. 448-449, 2011.
- 紀要・報告「地震体験教育をもっと多様な場所で、もっと多様なスタイルで」日本地震工学会 JAEE NEWSLETTER 第2巻、第4号 2013年12月
- 紀要・報告「コミュニケーションにスイッチを入れる技術」2016年日本建築学会 災害委員会シンポジウム『都市の地震災害を共助と技術力で乗り越えるには』
- 紀要・報告「地震体験VR 〜VRで地震の怖さを体験しよう〜」第23回耐震化推進都民会議, 2019年
- 梗概など「地震ザブトンの開発と減災啓蒙活動」日本地域安全学会梗概集No.33 , pp.33-36 , 2013.11
受賞
- 発明奨励賞2012年 関東地方発明表彰
- 技術賞2013年 日本地域安全学会
- 優秀賞ジャパン・レジリエンス・アワード2016
関連リンク
関連ページ・サイト
世界を驚かす独創的なロボット開発をしたい人は集まれ!
極限環境ロボット研究所
採用ページ