開発事例
HERO Lab.では、高温・高線量下など人の立ち入りが難しい「極限環境」で、⼈の代わりに作業するロボットやセンサ技術の開発に取り組んでいます。研究開発の都合上、一部のみの掲載になりますが、より広い分野に適用できる独創的なロボットや製品をご紹介します。

ワイヤ駆動と空圧駆動を組み合わせた
長尺ロボットアーム
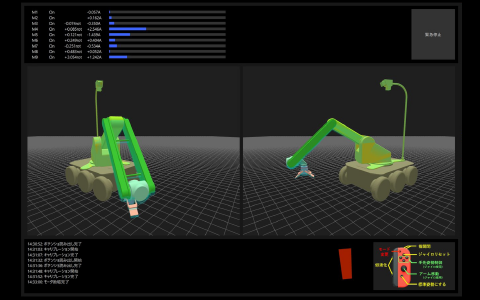
「Truss Arm」
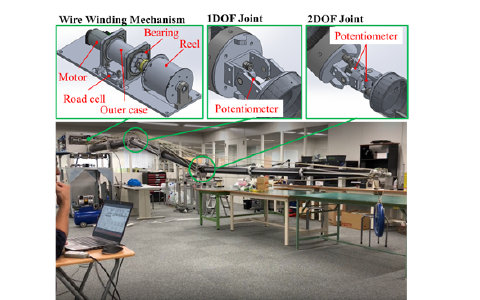
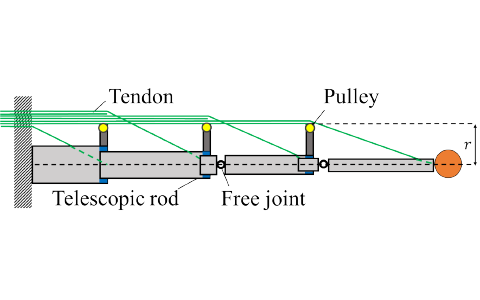
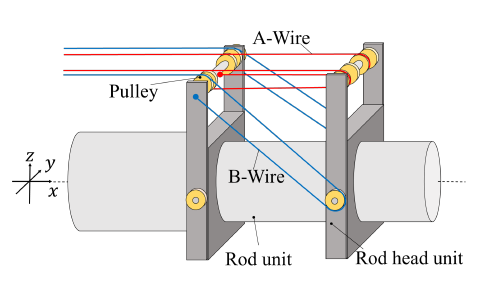
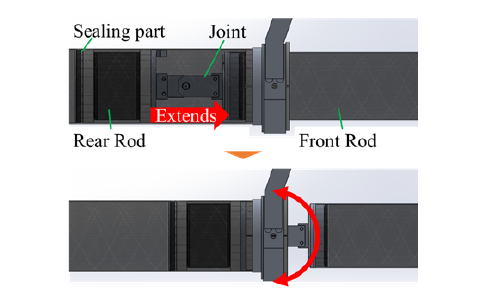
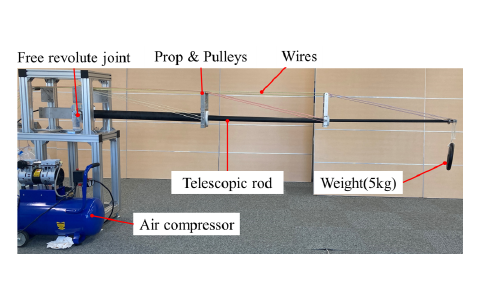
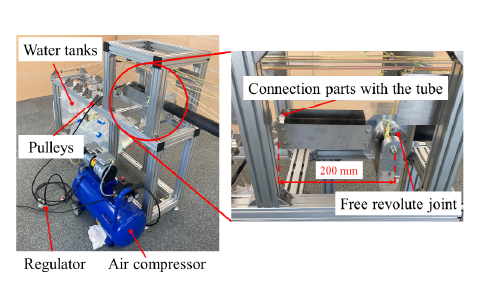
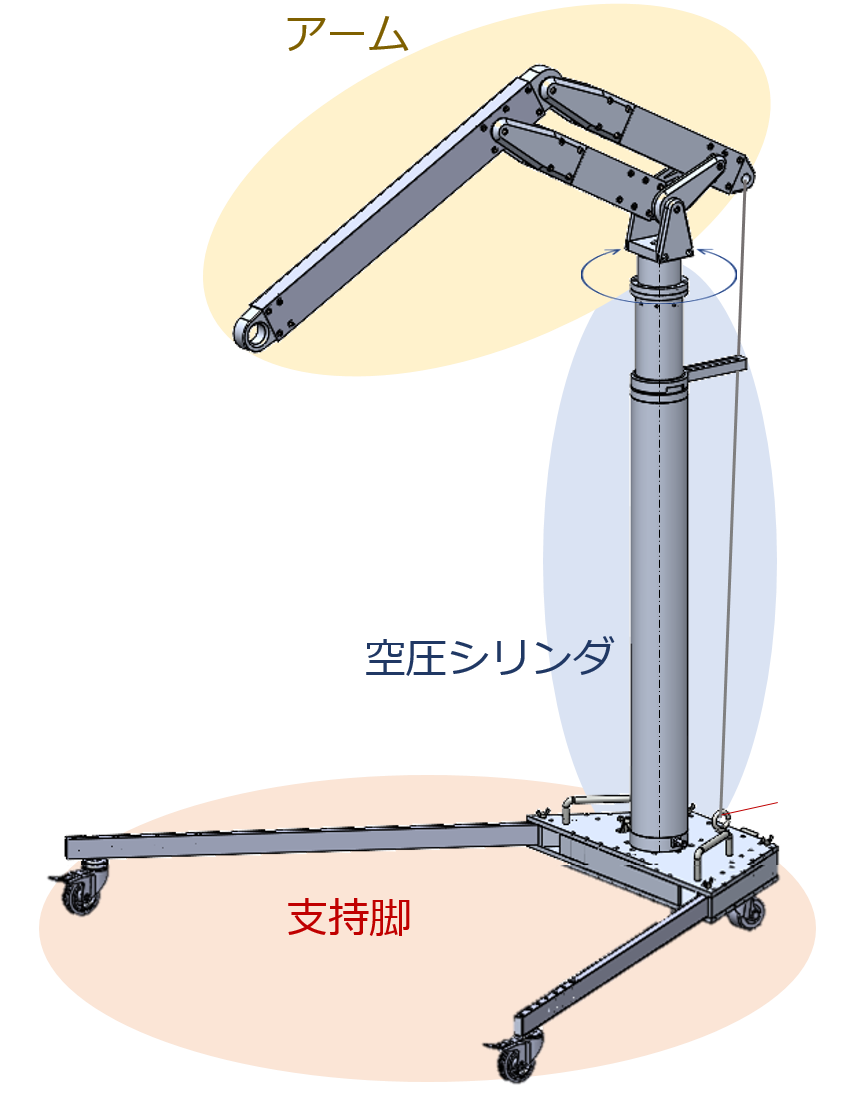
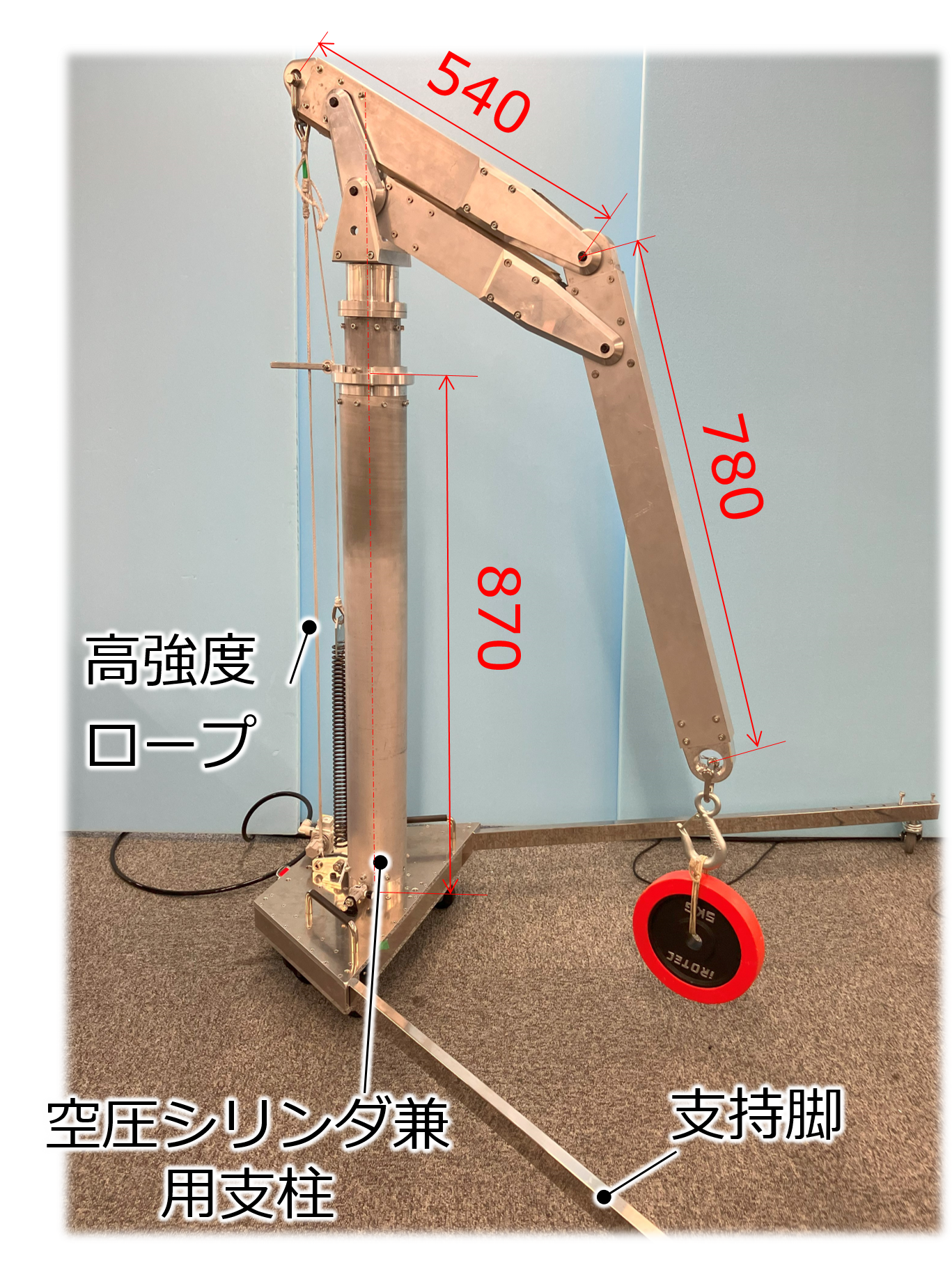
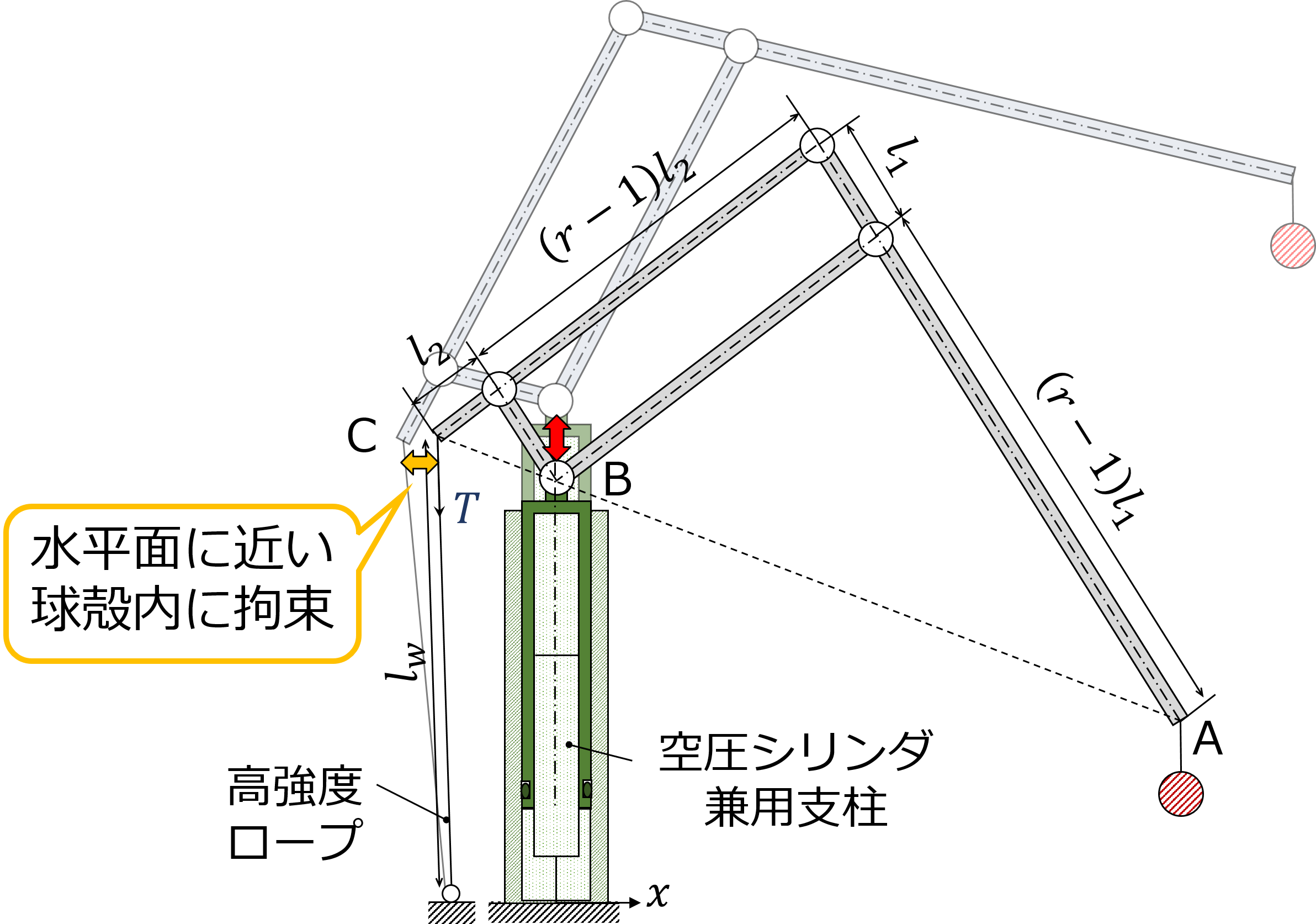
Truss Armは、福島第一原子力発電所の原子炉格納容器の内部調査や橋梁やプラントの点検作業などを遠隔操作で行うことが可能な、著しく長尺で軽量なロボットアームです。空気圧で伸展するテレスコピックロッドを複数のワイヤでトラス的に支持する構造であり、短く格納された姿勢から、撓みがない長尺に伸展した姿勢までを実現できます。また、テレスコピックロッド内に格納される複数の関節によって屈曲した姿勢を取ることも可能です。さらに、全てのモータや制御装置はロボットアームの根本に配置されるので、高い耐放射線性を持ちます。東京電力ホールディングス株式会社経営技術戦略研究所との共同研究によって開発されました。
主な仕様(1/2スケールモデル)
- 寸法:[アーム部]長さ 2.5m~7.7m、幅 210㎜、高さ 260mm [架台部]長さ 1.8m、幅 1.0m、高さ 1.9m
- 重量:[アーム部]25kg [架台部]250kg
- 駆動源:電気(AC100V)、圧縮空気(0.4-0.9MPa)
- エネルギー供給:有線
- 可搬重量:5kg(空圧0.4MPa印加時)
※空圧の大きさを変えることで、より大きな出力が可能
主な性能・特長
- ワイヤ張力と空気圧を適切に調整することで、ロボットアーム根本の曲げの負荷をアクティブに制御することができ、手先の負荷が大きくても撓まずに水平伸展することができる
- 空圧で伸展する構造であるためアーム内部を空洞化することができ、著しく長尺で軽量なロボットアームを実現できる
- 全てのモータや制御装置はロボットアームの根本に配置されるので、高い耐放射線性を持つ
- テレスコピックロッド構造を採用していることから、先端側のロッドをすべて根本側のロッドに格納可能で高い格納性を持つ
- テレスコピックロッド内に格納される複数の関節によって、伸展動作のみだけでなく屈曲動作も行うことができる
- 非常時にはテレスコピックロッド内部の空気を排気することで、比較的容易に回収することができる
紹介動画
3m試作機を用いた駆動原理検証実験
7.7m試作機を用いた伸縮動作実験
学会発表
岡朋宏,木村直人,和田周賢,広瀬茂男,”テレスコピックロッドとトラス状に配置された干渉ワイヤ駆動を用いた長尺アーム機構「Truss Arm」の提案”,ロボティクス・メカトロニクス講演会講演概要集 2023, pp. 2A–B10. 一般社団法人 日本機械学会, June 2023
岡朋宏,木村直人,内島大作,菊池史朗,鎌原健志,田尾健一,広瀬茂男,”屈曲関節を有するワイヤ干渉駆動型テレスコピック長尺アーム「Truss Arm」の伸縮制御”,第41回日本ロボット学会学術講演会, 第41回日本ロボット学会学術講演会講演予稿集, 一般社団法人 日本ロボット学会 ,September 2023
Tomohiro Oka, Naoto Kimura, Shigeo Hirose,” Truss Arm : the World’s Longest Telescopic Arm with Highest Payload and with No Deflection for the Decommissioning of Fukushima Daiichi Nuclear Power Plant”, The 16th IFToMM World Congress, Advances in Mechanism and Machine Science. IFToMM WC 2023,November 2023

汎用作業ロボット
「Phoenix-H」



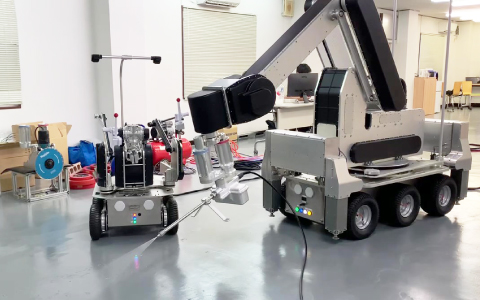
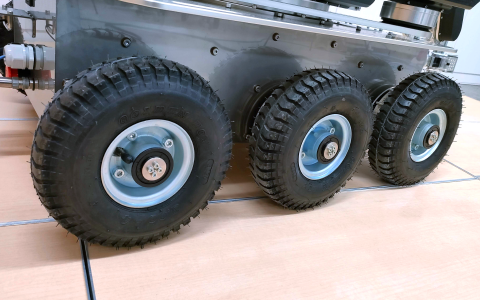
Phoenix-Hは、福島第一原子力発電所の廃炉作業で不可欠な残置物解体・回収作業などを遠隔操作で遂行可能な汎用型ロボットです。洗浄(除染)しやすく狭隘部も通過可能な6輪移動機構のほか、空気圧を用いた荷重補償機構により油圧並み可搬重量を持つ電動アームを備えています。また、ツールチェンジャを手先に備え、切断ツール・高圧洗浄ツール・拡張グリッパツールなどの作業に応じた種々のツールを遠隔操作で着脱できます。廃炉現場での実作業を担う東京パワーテクノロジー株式会社との共同研究によって開発されました。
主な仕様
- 寸法:W750×D1600×H1930mm
- 重量:500kg
- 駆動源:電気(単相200V)、圧縮空気(0.7-1.0MPa)
- エネルギー供給:有線
- 可搬重量:150kg
- 保護等級:IP66
主な性能・特長
- 実際の廃炉作業で不必要な階段昇降性を捨て、除染しやすく不整地踏破性も高い6輪走行方式を採用
- タイヤの内圧を変えることによる6輪の接地圧制御を用いて、旋回や段差踏破を補助可能
- エアシリンダ・パンタグラフ機構・電動モータからなる荷重補償機能付き電動アームにより、150kgの可搬重量と高い制御性を両立
- 手先を駆動するモータや電子回路を基台部に収め、チェーンやワイヤなどの機械要素で遠隔駆動する構成により、高い耐放射性を実現
- 手先にツールチェンジャを備え、遠隔操作によって作業に応じた種々の電動ツールを把持・使用可能
- 最新式のゲームコントローラを用いた直感的で使いやすいユーザーインターフェースを導入
紹介動画
Phoenix-Hの紹介
学会発表
木村直人, 和田周賢, 広瀬茂男,”空圧バランサ付き高可搬重量アーム機構と接地圧分布可変式6輪車両機構からなる廃炉作業用遠隔操作ロボットPhoenix-Hの開発 ”,ロボティクス・メカトロニクス講演会2024, 1P2-A02,2024

汎用作業ロボット
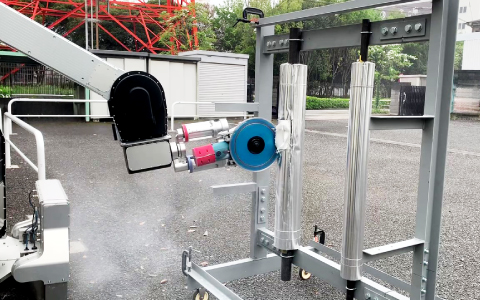
「Phoenix-L」

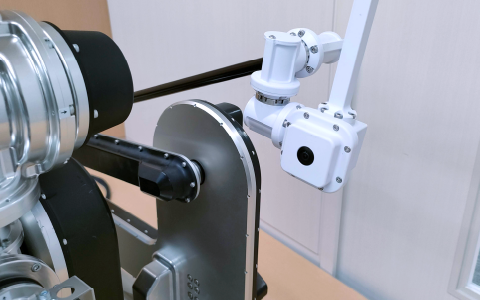
Phoenix-Lは、福島第一原子力発電所の廃炉作業で不可欠な点検作業や軽量な残置物回収などを、作業者に代わって遠隔操作で遂行可能な汎用型ロボットです。現場で特に必要とされない階段昇降機能を除外して洗浄(除染)しやすい6輪方式を採用し、複数のカメラを任意位置に移動できるカメラスタンドと、モータや制御回路をすべて基台部に収め機械要素のみで駆動されるアーム機構で、高い遠隔操作性と耐放射線性を実現しています。東京パワーテクノロジー株式会社との共同研究によって開発されました。
主な仕様
- 寸法:W640×D950×H1270mm
- 重量:100kg
- 駆動源:電気(AC100V、400W)、圧縮空気(0.6-1.0MPa)
- エネルギー供給:有線
- 可搬重量:5kg
- 保護等級:IP66
主な性能・特長
- 実際の廃炉作業で不必要な階段昇降性を捨て、除染しやすく不整地踏破性も高い6輪走行方式を導入
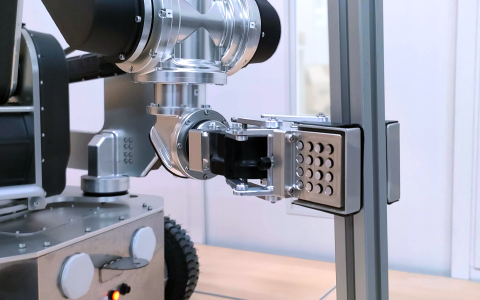
- モータや電子回路を基台部に収め、機械要素でグリッパを含む7自由度を遠隔駆動するアーム機構を導入し、高い耐放射性を実現
- 非平行4節リンク型グリッパと視覚式触覚センサにより、遠隔による高いハンドリング性を実現
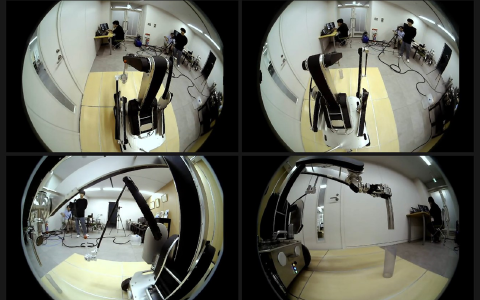
- カメラを任意位置に移動可能な自重補償カメラスタンドを用いた視覚支援システムにより,高い遠隔操作性を実現
- 最新式のゲームコントローラを用いた直感的で使いやすいユーザーインターフェースを導入
紹介動画
Phoenix-Lの紹介
Phoenix-Lを用いた遠隔操縦による3Dマッピング
学会発表
木村直人, 和田周賢, 岡朋宏, 広瀬茂男,”廃炉作業を目的とした移動作業ロボット"Phoenix-L"の開発 ”,ロボティクス・メカトロニクス講演会2023, 2A2-B09, 2023.
木村直人, 和田周賢, 岡朋宏, 広瀬茂男,”自重補償カメラスタンドと視覚式触覚センサを用いた遠隔操作ロボットの操縦支援システムの開発 ”,ロボティクス・メカトロニクス講演会2023,2A1-B09,2023.
木村 直人, 樋口 竣哉, 広瀬 茂男,擬似平行開閉と大開閉を両立する4節リンク型グリッパの量の総合に向けた機構定数解析,第41回日本ロボット学会学術講演会,1C4-02,2023.

狭隘スペースでも使用可能なエアバランサー
「KUROKO-50」

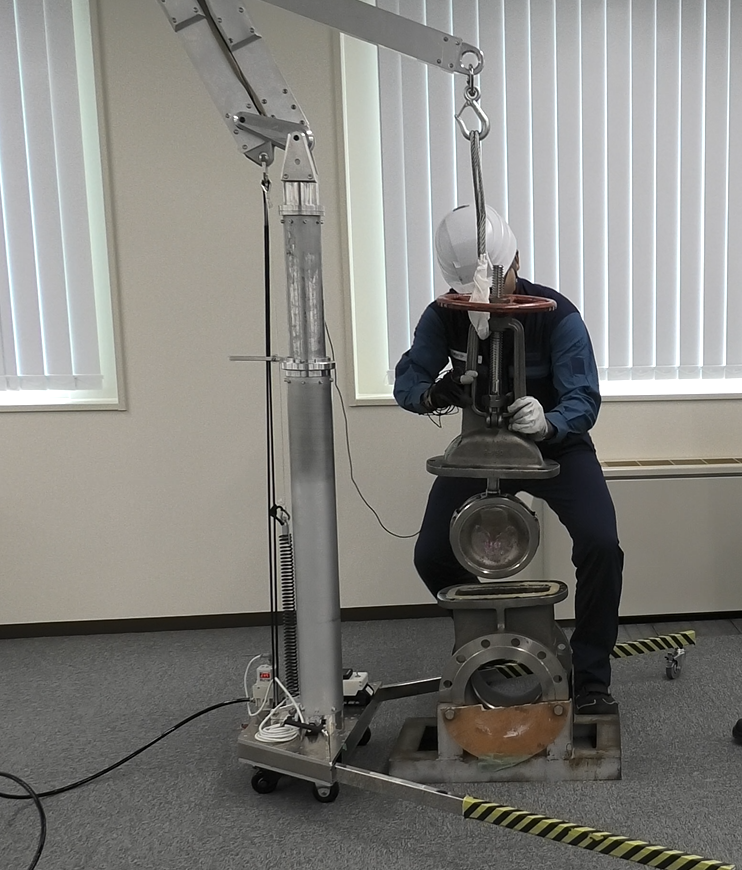
KUROKO-50は、狭隘スペースでも使用可能な小形軽量なエアバランサーです。本体重量よりも大きな荷重を小さな力で移動させることができるため、手元で細かい位置決めができます。重い部品から構成される大型機器・設備の組立などでの活躍が期待されます。試作機の設計では火力発電所内の防爆エリアでのメンテナンス業務での使用を想定していましたが、防爆ではない狭隘な環境下での使用も考慮し、操作性を重視したコントローラの開発も行っています。
主な仕様
- 寸法:W1460mm×D1060mm×H1450mm
(アーム最高到達高さ:1900mm) - 本体重量:35kg
- 可動範囲:半径約1m
- 使用荷重:50kg
- 駆動源:圧縮空気(≤0.6MPa)
主な性能・特長
- 軽量コンパクトであり、重量物の重さをバランスして無重力のようにハンドリングできる
- ワイヤレスコントローラで作業者自身がバランス力を自在に調整できる
- 可搬重量5㎏タイプ、可搬重量150㎏タイプも準備中
紹介動画
「KUROKO-50」での作業デモ

浮体を有する把持機構を備えた水中重量物回収ロボット
「Buoy Boat」
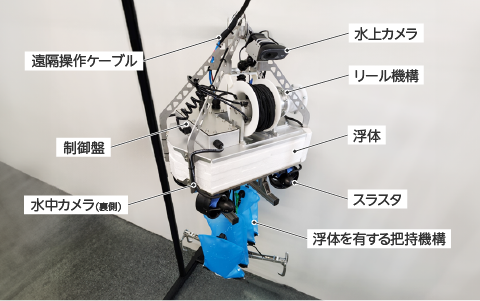

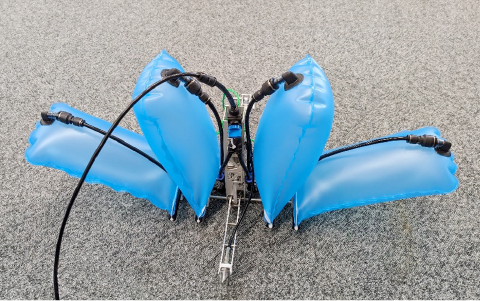

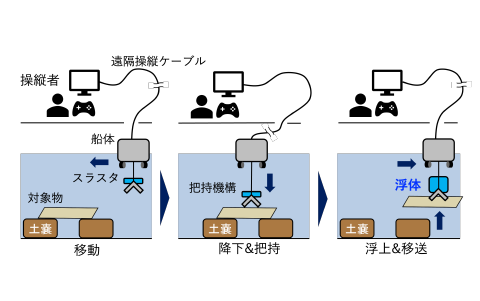
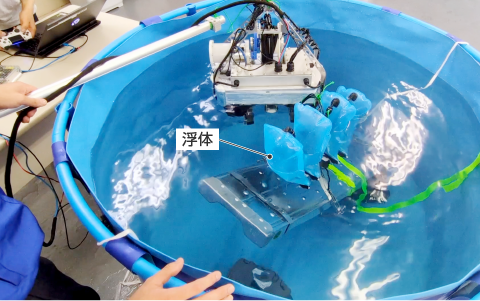
Buoy Boatは、福島第一原子力発電所の建屋内の水中の残置物を回収するための遠隔操作ロボットです。Buoy Boatに搭載されたハンドは内部の空気量の調整が可能な浮体を備えており、浮力を利用することで水中での重量物のハンドリングが容易です。また、コンパクトなサイズ・形状に設計されており、狭隘な穴から投入することが可能です。さらに、Buoy Boatは水上を移動するボート型のロボットなので、水底に沈んだ粉塵を巻き上げることはなく、ロボットに備えたカメラからの視界を悪化させず、確実な作業を行えます。
主な仕様
- 寸法:W400mm×D240mm×H800mm(ハンド含む)
- 重量:10.3㎏
- 駆動源:電気(AC100V)、圧縮空気(0.1-0.4MPa)
- エネルギー供給:有線
- 可搬重量:4kg
主な性能・特長
- 浮体の浮力を利用することで、水中での重量物のハンドリングが容易
- コンパクトな機体なので、狭隘な穴からのロボットの投入が可能
- 水上付近を移動するため水底の粉塵の巻き上げがなく、ロボットに備えた水中カメラの視界を悪化させない
紹介動画
「Buoy Boat」水上実験動画
学会発表
大嶋 俊之, 岡 朋宏, 木村 直人, 広瀬 茂男,浮体を有する把持機構を備えた水中重量物回収ロボット“Buoy Boat”の開発,第42回日本ロボット学会学術講演会,1E5-02,2024

配管検査ロボット
「風神」
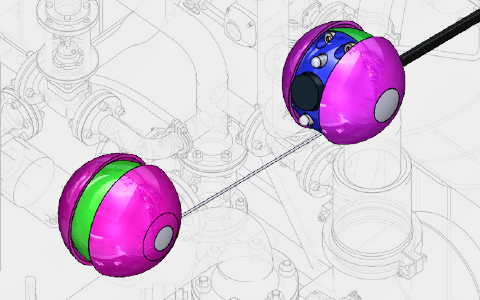
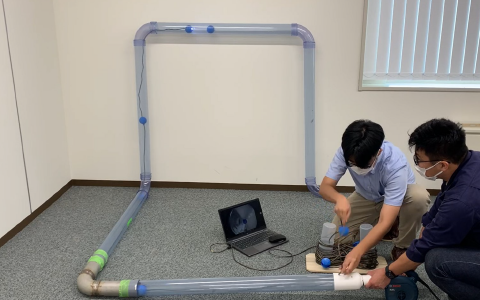

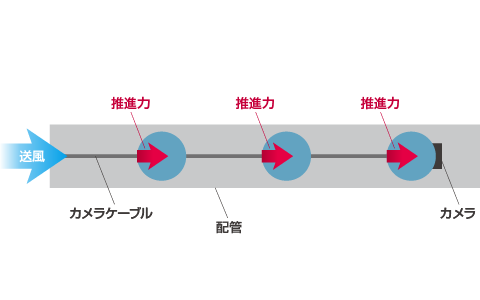
風神は、風力により複雑な長距離配管を移動できる管内カメラです。カメラ以外には電子機器を搭載しないシンプルな軽量設計で、配管開口部に取り付けたブロアからの風圧を受けて推進します。独自の機構構造と駆動方式により管内での摩擦を大きく低減することで、従来の配管点検ロボットでは困難であった長距離かつ複雑な配管内の点検を可能にしました。誰でも操作しやすく、国内のインフラ関連設備で大規模な運用実績があります。
主な仕様
- 対応径:65A 80A 100A(応相談)
- 点検可能距離:0~30m(配管径や構造による)
- 定格電圧:点検カメラ→DC5V,ブロア→AC100V
- 消費電力:1500W(ブロアの消費電力)
- カメラ解像度:800万画素
- レンズ:180°魚眼
- 接続方法:USB
- 装置重量:約2kg
主な性能・特長
- 風圧による推進力でスピード点検
- ベンドの多い複雑な配管や長尺配管も点検可能
- 800万画素の高精度魚眼カメラを搭載
- カメラ映像はノートPCでリアルタイムに確認可能
- 単純操作で誰でも使いやすい
- 重力を用いた姿勢指示装置により、配管内のカメラ姿勢を視覚的に把握可能
- 非常時には逆側開口部からの送風でカメラを安全に回収可能
学会発表
木村直人, 岡朋宏, 広瀬茂男,”風力により複雑な長距離配管を移動できる管内カメラ「風神」の開発 ”,第40回日本ロボット学会学術講演会,3G1-06,2022.

遠隔操作可能な掃除ロボット
「熊手」


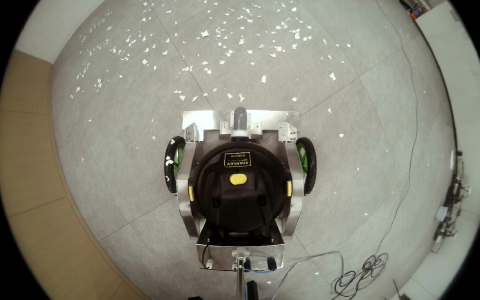
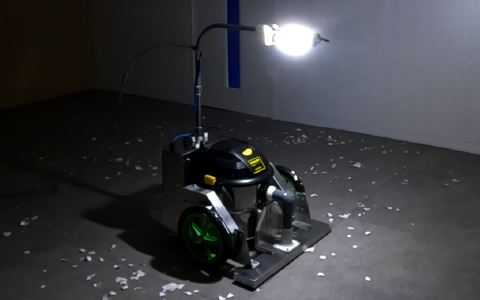
熊手は遠隔で操作ができる強力な吸引性能を持つ乾湿両用掃除ロボットです。小型の掃除機を遠隔で操縦することができるため、通常、人が入るには狭すぎる場所や、天井が低すぎる空間での掃除に威力を発揮します。熊手は、一般的な工業用の自動掃除ロボットよりも強力な吸引力を持つ上に、人が遠隔で現場の様子を見ながら操縦するため、ゴミの取り残しや帰還不能状態に陥る心配がありません。火力発電所内のホットウェルと呼ばれるピットでの清掃作業を代替する目的で開発されました。
主な仕様
- 寸法:W600×D620×H950mm
- 重量:22.3kg
- 定格電圧:AC100V
- 定格周波数:50Hz/60Hz
- 消費電力:1500W
- 最大風量:2.5m^3/min
- 最大真空度:17KPa
- 吸引仕事率:213W
- 集塵容量:15L
- カメラ視野角:180度
- カメラ画素数:800万画素
主な性能・特長
- 乾いた塵や埃だけでなく、湿った泥や鉄粉など工業用のダストも吸引
- 各車輪の回転方向を独立に制御することで,前進・後退・その場旋回が可能
- 有線接続のため、バッテリーの心配不要
紹介動画

息苦しさを軽減するマスク補助器具
「HEROインナーマスク」

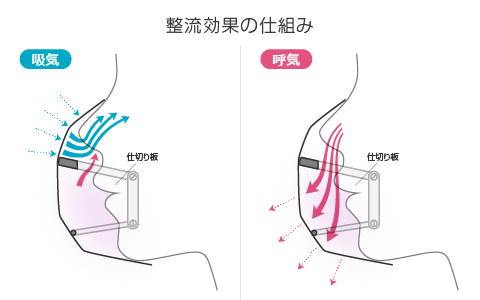
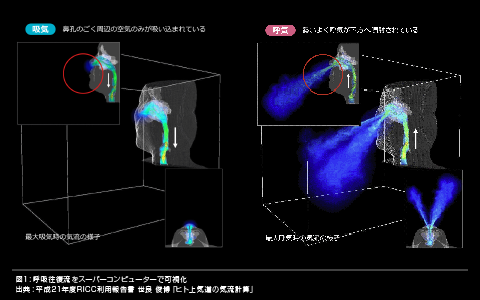
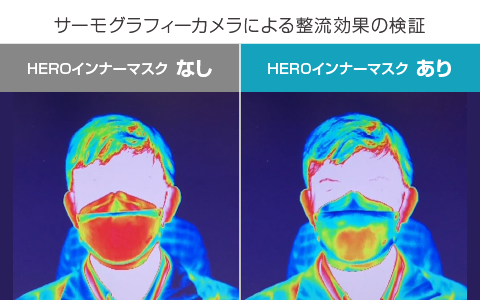

HEROインナーマスクは不織布マスクを着用した際の息苦しさを軽減するインナーフレームです。一般的なマスク用インナーフレームはマスクを顔から浮かせて呼気を逃がすことで息苦しさを軽減させますが、顔とマスクの間に大きな隙間ができてしまうので、十分な感染予防効果を望めません。HEROインナーマスクはフレームに備えられた独自の仕切板機構により、顔とマスクの間に隙間を作らない正しいマスク着用法をしながら、マスク内で呼気を一方通行に整流させることができるので、息苦しさが軽減します。
主な仕様
- 重量:4.5g
- サイズ:装着時 W100×D55×70mm 収納時 W100×D50×H10mm
- 対応マスクサイズ:ふつうサイズ
主な性能・特長
- 呼吸・会話がラク
- 眼鏡の曇り防止
- 化粧崩れ防止
- コンパクトに折りたためるからサッとしまえる
- 軽量の4.5g、ポリプロピレン素材
- 手入れが簡単で、繰り返し使える
不織布マスク内の空気を整流し、息苦しさを軽減するマスク補助器具HEROインナーマスク
詳しく見る世界を驚かす独創的なロボット開発をしたい人は集まれ!
極限環境ロボット研究所
採用ページ研究開発
HAKUSANが大切にしている価値観「おもしろいモノをつくろう」。
この原点となる研究開発の取り組みについてご紹介します。