Extreme environments are inaccessible to humans owing to factors such as high temperature or high levels of radiation, where conventional sensors and robots cannot be utilized. The Hyper-Environmental Robots Laboratory (HERO Lab) was established to develop robots and sensor technologies capable of replacing humans in such environments. The aim of the HERO Lab is to contribute to work under extreme environments predicted to be required in the future. Undertaken projects focus on inspection of infrastructure facilities, by developing practical products through repeated research and development, field installation, and improvement. HERO Lab has partnered with Tokyo Power Technology Ltd. (TPT) for technology assistance.
Source of photo: Tokyo Electric Power Company Holdings
Background
Japan is known as the robotics capital of the world, where robotics research is thriving; however, during the Fukushima nuclear disaster in 2011, no Japanese-made robot reached the stage of practical use. This is because projects were stuck at the research stage and lacked opportunities and development systems to improve the robots that had been developed by incorporating them into the field. In the future, for several decades, it will be necessary for practical robots to perform tasks in place of humans and assist them in extreme environments such as nuclear decommissioning sites. Accordingly, we need a systematic design and manufacturing system that unifies the maintainability and operability of the various types of robots required for different purposes, make them easy to understand so that they can be operated by workers rather than developers. Overall, it is important to build a track record of robots being utilized at actual work sites and performing useful roles on site. In addition, robots need to work not only with mechatronics but also with complex areas such as sensing and analysis. To bridge this gap, Hakusan Corporation in partnership with the Tokyo Institute of Technology organized a symposium on extreme environment sensing technology in 2019.
Director

[HERO Lab.]
Hyper-Environmental Robots Laboratory
Shigeo Hirose, Director
At the Tokyo Institute of Technology, Shigeo Hirose conducted pioneering research in robotics and mechanical engineering, contributing to the development of robotics through the invention of several new mechanisms. He is dedicated to establish and implement courses that foster creativity and promote manufacturing education beyond the framework of universities. After leaving the Tokyo Institute of Technology in 2013, he served as the President and Chairman of Hi-Bot, a Tokyo Tech venture. In 2020, he became the director of the Hyper-Environmental Robots Laboratory [HERO Lab], that is developing robots for infrastructure inspection and decommissioning of the Fukushima Daiichi nuclear power plant, thereby inching towards his goal of developing “helpful robots.”
Brief history
- 1947:Born in Tokyo
- 1976:Doctor of Engineering, Department of Control Engineering, Tokyo Institute of Technology, Assistant Professor, Department of Mechanical Sciences and Engineering, specialization in robotics
- 1979:Associate Professor, Department of Mechanical Sciences and Engineering, Tokyo Institute of Technology
- 1992:Professor, Department of Mechanical Sciences and Engineering, Tokyo Institute of Technology
- 2011:Distinguished Professor, Graduate School of Science and Engineering, Tokyo Institute of Technology
- 2013:Professor Emeritus, Tokyo Institute of Technology
- 2020:Director, Hyper-Environmental Robots Laboratory, Hakusan Corporation
Major Awards
- 1999:First IEEE Pioneer in Robotics and Automation Award
- 2006:Medal With Purple Ribbon
- 2009:The Joseph Engelberger Robotics Award
- 2013:Technical Achievement Award, Japan Society of Mechanical Engineers
- 2017:IEEE Inaba Technical Award for Innovation Leading to Production
- 2021:The Order of the Sacred Treasure
* Recipient of 81 academic achievement-related awards.
*Individual academic awards received for books and papers are listed in the main publications section below:
Main Publications
- ■ “Nature and Robots 2: Snakes,” published by Kirihara Shoten, April 1985
- ■ “Biomechanical Engineering,” published by Kogyo Chosakai, August 1987
The Nikkan Kogyo Shimbun Technology and Science Book Culture Award, Grand Prize, November 1988 - ■ “Robot Engineering,” published by Zoukabo, December 1987
Teshima Memorial Research Prize for Writing, March 1989
Writing Award, The Society of Instrument and Control Engineers, July 1989 - ■ “Biologically Inspired Robots,” published by Oxford Univ. Press, June 1993
Teshima Memorial Research Prize for Writing, May 1994 - ■ “Introduction to Robot Creation Studies,” published by Iwanami Junior Shinsho, June 2011
Robot Development Experience
Director Shigeo Hirose has been involved in research and development in the following fields:
-

Chapter 01
Find out more
Biomechanical Study of Snakes and Snake-like Robots -
In 1971, during his post-graduation at the Tokyo Institute of Technology, Shigeo Hirose began researching the propulsive dynamics of living snakes by mathematical analysis and animal experiments. He pursued working in the same field for his doctoral thesis in 1976. This unprecedented biomechanical study of actual snakes was a pioneering step in research on snake-like robots, which has set the standard for biomechanical research worldwide. Till date, no comparable research has been performed anywhere in the world, and the results of this research are still relevant.
In 1972, he succeeded in developing the world's first snake-like robot propelled by the same principles as those of a real snake. Since then, he has led global research on the development of snake-like robots by conducting a wide range of developmental research, including robots designed to explore tight spaces, robots for rescue applications, robots with tactile signal processing, and robots capable of three-dimensional amphibious motion. The serpenoid curve, that is, the curved body shape of a snake when controlling the first snake-like robot, is now used by researchers worldwide as the basic curve for snake-like robots.Awards on this topic
- ① Yoji Umetani and Shigeo Hirose: Biomechanical study on serpentine locomotion–gliding shape of snake in stationary straightforward movement, Transactions of the Society of Instrument and Control Engineers, 10, 4, pp.513–518 (1974) (Best Paper Award of the Society of Instrument and Control Engineers, 1976.8.26)
- ② Shigeo Hirose, Shunta Oda, and Yoji Umetani: Active cord mechanism with oblique swivel joints and its control, Transactions of the Society of Instrument and Control Engineers, 17, 6, pp.686–692 (1981) (Transactions of the Society of Instrument and Control Engineers, July, 28th 1983)
- ③ Shigeo Hirose, Akio Morishima, Shinichi Tsukagoshi, Toshimichi Tsumaki, and Hiroyuki Monobe: Design of Snake-like Vehicles: Articulated Body Mobile Robot KR II, Journal of the Robotics Society of Japan, 9, 5, pp.551–559 (1991) (Technical Award of the Robotics Society of Japan, November,1st 1992).
- ④ Shigeo Hirose and Takeo Mitsui: Proposal for the whole stem drive-type moving mechanism in a pipe, Proc. Robotics and Mechatronics Conference 93, pp.699–702 (1993) (JSME Robotics and Mechatronics Division, Best Poster Award at the Conference on Robotics and Mechatronics, July, 7th 1993)
- ⑤ Toshio Takayama and Shigeo Hirose: Study on 3D active cord mechanism with helical rotational motion, Journal of the Robotics Society of Japan, 22, 5, pp. 625–635 (2004) (Robotics Society of Japan, Best Paper Award, September,15th 2006).
- ⑥ Shigeo Hirose: BEST PAPER award, IEEE International Workshop on SSRR2006, August 22–24, 2006 NIST, Gaithersburg, Maryland USA, Masayuki Arai, Yoshinori Tanaka, Shigeo Hirose, Shingo Tsukui, Hiroyuki Kuwahara: “Improved Driving Mechanism for Connected Crawler Vehicle “Souryu-IV” for In-Rubble Searching”
- ⑦ Shigeo Hirose (recipient) Shigeo Hirose (designer): amphibious snake-like robot ACM-R5, 2006 Good Design Award, New Frontier Design Category, October 25, 2006.
- ⑧ Shigeo Hirose: Tokyo Tech Innovative Research Engineering Award, “Development of Multi-Wheeled Snake-Type Rubble Search Robot Souryu-Ⅶ” (September, 17th 2008)
His doctoral dissertation and subsequent book on snake-like robots, “Biomechanical Engineering” (Kogyo Chosakai), and its English translation, “Biologically Inspired Robots (Snake-like Locomotor and Manipulator)” (Oxford University Press), is considered as the bible of research for snake-like robots, and have received the following awards:
- ① Shigeo Hirose: Biomechanical Engineering, Kogyo Chosakai. (1987) (Nikkan Kogyo Shimbun, 4th Technology and Science Book Culture Award (Grand Prize), November, 10th 1988)
- ② Shigeo Hirose: Biologically Inspired Robots (Snake-like Locomotor and Manipulator), Oxford University Press, pp. (1993) (Teshima Memorial Writing Award, Teshima Foundation for Industrial Education, May, 24th 1994)
-

Chapter 02
Find out more
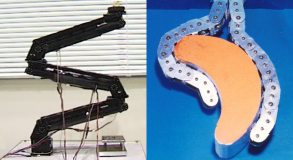
Snake-shaped Articulated Arms -
Hirose also conducted systematic research on snake-like arms, which are long, slender, and can be bent at will. Prototypes have been made of approximately every conceivable arm shape, some of which have been put into practical use. One of these, the “Soft Gripper”—a snake-like robot gripper comprising a small number of drive systems and several joints—achieved soft grasping of arbitrarily shaped objects. This is regarded as pioneering research on inferior drive arms, which has been researched worldwide. Other projects in this area include research on articulated arms driven by coil spring joints with multiple tube wires, research on active endoscopes driven by shape memory alloys, and CT-Arm, which drives each joint from the root with wires and uses “interference drive” to actively apply wire tension to the root joint. He also conducted research on the float arm, which is an articulated arm with a wire-driven weight compensation mechanism.
Among these, the float arm research was put to practical use as an articulated balancer in a joint development project with Nissan Motors, helping to reduce the company’s manufacturing costs, improve quality, and enhance ergonomics. The company received the first Carlos Ghosn award for these results. This was later licensed to CKD, which commercialized it under the name “Power Arm”. This arm was further improved by Hi-Bot Co. Ltd. as an articulated robot arm for plant inspection and is now sold as one of its main products.Awards on this topic
- ① S. Hirose and Y. Umetani: The development of soft gripper for the versatile robot hand, Mechanism and Machine Theory, 13, 3, pp.351–359 (1978), Award for Excellence by Elsevier (2017), top 10 most cited papers since its first publication.
- ② Koji Ikuta, Masahiro Tsukamoto, Shigeo Hirose, Shape Memory Alloy Actuator System with Electric Resistance Feedback and Application for Active Endoscope, Proc. of ICRA, 1, 3, pp.427–430 (1988), The most influential paper award from ICRA (IEEE Robotics and Automation Society), May, 24th 2018
- ③ Shigeo Hirose and Shugen Ma: Development of tendon driven multi-joint manipulator based on coupled drive, Transactions of the Society of Instrument and Control Engineers, 26, 11, pp.1291–1298 (1990), Best Paper Award of the Society of Instrument and Control Engineers, July, 23th 1992
Award (1) was for a paper on snake-like robotic grippers, published in 1978. In 2017, it was recognized as one of the 10 most cited papers in the journal Mechanism and Machine Theory since its first publication.
Award (2) was for a paper published in 1988 on a snake-shaped active endoscope using shape memory alloy, which was recognized in 1991 as the most influential paper since 1988 at the International Conference on Robotic and Automation (ICRA), a major international conference on robotics sponsored by the Institute of Electrical and Electronics Engineers (IEEE), the world's largest academic society.
-
Chapter 03
Find out more
Quadrupedal Robots -
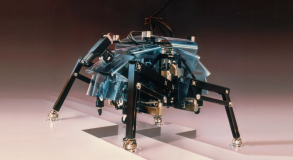
After his research on snakes and snake-like robots, he began parallel research and development on quadrupedal robots, devising a design principle called gravitational decoupled actuation (GDA), an energy-efficient leg design method. In 1981, he was invited to Ohio State University for two months to participate in a project to develop a hexapod walking robot, the adaptive suspension vehicle, which was being conducted by DARPA, a new technology research organization in the U.S. Department of Defense. The proposed leg mechanism based on the GDA principle was adopted for the robot in this project. At that time, the global trend in multi-legged robots was toward six-legged robots. However, Hirose consistently insisted on the superiority of four-legged robots, and since then, global research has focused on four-legged robots.
Subsequently, research on quadrupedal robots led to the development of TITAN 11, a 15-ton robot that functions as a moving scaffold for civil engineering work on slopes. Unfortunately, TITAN 11 has not yet been put to practical use for economic reasons, but this research relays how multi-legged walking robots, which are not yet utilized in industrial applications, could be used in the real world.
In the 1990s, there was a growing demand for research on controlling the gait of quadrupedal robots, but there were no suitable walking robots to conduct experiments. This hindered the progress of walking robot research in Japan. Hirose then developed a quadruped robot as a research platform and made it commercially available at a low cost through a partner company (Okazaki Corporation). This robot has been introduced in laboratories all over Japan.
His research on control methods for quadrupedal robots is summarized in paper ① below, which was awarded the first Best Paper Award by the Robotics Society of Japan. In addition, because it is desirable for robots to be able to run on wheels as well as walk on flat terrain, he also researched “roller walkers” in which the feet turn into roller skates when standing vertically, as well as a robot that can switch between walking and crawling movements.Awards on this topic
- ① Shigeo Hirose, Yasushi Fukuda, and Hidekazu Kikuchi: The Gait Control System of the Quadruped Walking Vehicle, Journal of the Robotics Society of Japan, 3, 4, pp.304–324 (1985) (The Robotics Society of Japan 1st Paper Award, November, 27th 1987)
- ② Shigeo Hirose and Keisuke Arikawa: Development of Quadruped Walking Robot TITAN-VIII for Commercially Available Research Platform, Journal of the Robotics Society of Japan, 17, 8, pp.1191–1197 (1999) (The Robotics Society of Japan Practical Application Technology Award, September, 13th 2000., also awarded to Fumihiko E. Fukushima and Masaharu Katagiri (Tokyo Seiki)).
- ③ Gen Endo and Shigeo Hirose: Study on Roller Walker: Multi-mode steering control and self-contained locomotion, Journal of the Robotics Society of Japan, 18, 8, pp.1159–1165 (2000) (Robotics Society of Japan Best Paper Award, October, 13th 2002)
- ④ Ryokichi Ochiai and Shigeo Hirose: Research on a combined leg and crawler mobile robot for uneven terrain (3D3-4), 6th SICE System Integration Division Conference (2005)
- ⑤ Masashi Takahashi, Kan Yoneda, and Shigeo Hirose: Moving on Uneven Terrain by Leg-Wheel Hybrid Quadruped Robot (1M1-2), 6th SICE Conference on System Integration (2005) (Best Session Award December, 18th 2005)
- ⑥ Ryuichi Hodoshima, Takahiro Doi, Yasushi Fukuda, Shigeo Hirose, Toshihito Okamoto, and Junichi Mori: Development of a Quadruped Walking Robot TITAN XI for Steep Slope Operation-Step Over Gait to Avoid Concrete Frames on Steep Slopes - Ryuichi Hodoshima, Takahiro Doi, Yasushi Fukuda, Shigeo Hirose, Toshihito Okamoto, and Junichi Mori, Journal of Robotics and Mechatronics, 19, 1, pp.13–26 (2007) (The JRM Best Paper Award, May, 1st 2009)
- ⑦ Gen Endo and Shigeo Hirose: Study of Roller Walker - Improvement of Locomotive Efficiency of Quadruped Robots by Passive Wheels, Advanced Robotics, 26, pp.8–9 (2012) (Best Paper Award September, 5th 2014)
-

Chapter 04
Find out more
Land Mine Detection and Removal Robots -
Hirose believes that it is important to contribute to reducing the workload in dangerous locations where humans cannot work, and is developing humanitarian robots aimed at helping citizens in conflict zones. In 1996, he presented his research on Japan's first landmine detection and removal robot to the Robotics Society of Japan, and participated in the “Research and Development of Sensing, Access and Control Technologies, to Support Detection and Removal of Anti-Personnel Mines from a Humanitarian Perspective” project launched to support reconstruction efforts in Afghanistan by the Japan Science and Technology Agency (JST) in 2002. He visited Cambodia, Croatia, Afghanistan, and other countries to develop a practical landmine-detection robot called Gryphon. He has developed new detection technologies with enhanced detection capabilities using the most trusted and utilized metal detectors in the field, for which he has received an academic awards. The story of development of landmine detection robot is also employed as a learning resource in the second year high school English textbook CROWN (Sanseido) in Japan, under the title “Before Another 20 Minutes Goes By.” Experiments in Croatia indicated that Gryphon can detect landmines more accurately than human landmine detectors.
This research was continued by his co-researcher Fumihiko Edwardo Fukushima, a professor at Tokyo University of Technology, and was employed in a trial mine detection and clearance operation in Angola in 2019.Awards on this topic
- ① Tetsuya Narita, Fumihiko E. Fukushima, and Shigeo Hirose: Study of Discrimination Methods for Metal Fragments and Mines in Humanitarian Demining Tasks, The 2010 International Symposium on Intelligent Systems (iFAN 2010), Paper No. 542, Sep. 25–26, 2010, Tokyo, Japan (Presentation Award, September, 26th 2010).
-
Chapter 05
Find out more
Infinite Rotation Robots -
After developing snake-like and multi-legged walking robots, in the pursuit of more practical forms of mobile robots, Hirose began to explore ways of movement using infinitely rotating devices such as wheels and rollers. An example is a crawler-driven vehicle that can adapt to terrain, for which he has received academic awards ①, ⑤, and ⑦, as mentioned below. This included the development of a new type of lightweight crawler belt and crawler vehicles. The usage of this belt is commercialized by Topy Industries. A few of these vehicles have been utilized for internal investigations at the Fukushima Daiichi nuclear power plant.
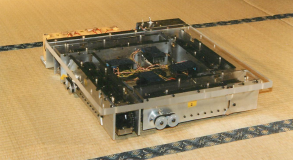
Further developments include the development of an “omnidirectional moving vehicle, called VUTON or Vmax. For this work, he received award ② below. In addition, he developed an earthquake simulator with Hakusan Corporation, using this omnidirectional vehicle. This is discussed in detail in Section 6.
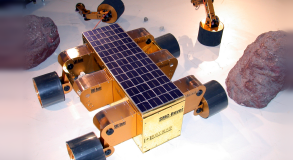
He also developed planetary exploration rovers with infinitely rotating wheels for space exploration, for which he received awards ③, ④, and ⑥ below.Awards on this topic
- ① Shigeo Hirose, Sanehito Aoki, and Jun Miyake: Terrain adaptive quadrutrack vehicle HELIOS II, Proc. 20th ISIR, Tokyo, pp.235–243 (1989) (Japan Industrial Robot Association JIRA Award, October, 25th 1990)
- ② Shigeo Hirose and Shinichi Amano: Development of high efficiency omnidirectional vehicle with large load, Proceedings of the Conference on Robotics and Mechatronics '93, pp.350–355 (1993) (ROBOMEC Award, Robotics and Mechatronics Division, The Japan Society of Mechanical Engineers, June, 30th 1994)
- ③ Shigeo Hirose, Naritoshi Ootsukasa, Takaya Shirasu, Hiroyuki Kuwahara, and Kan Yoneda: Fundamental considerations for the design of a planetary revolution. Proc. ICRA, Nagoya, pp.1939–1944 (1995) (IEEE Robotics and Automation Society 1995 Best Conference Paper Award, May, 26th 1995)
- ④ Shigeo Hirose and Hiroyuki Kuwabara: Design of Lunar and Planetary Rovers at Tokyo Institute of Technology, Design Engineering, 33, 12, pp. 449–454 (1998) (The most interesting reading award of Japan Society for Design Engineering, May, 22nd 1999)
- ⑤ Shigeo Hirose, Jun Miyake, and Sanehito Aoki: Terrain-adaptive crawler vehicle, Patent No. 2717722, Patent registration date: 9.11.14 (Teshima Commemorative Invention Award, Teshima Foundation for Industrial Education, March, 19th 2001)
- ⑥ Atsushi Kawakami, Kazuhiro Motomura, and Shigeo Hirose: SMC Rover- Planetary Rover with Transformable Wheels, ICRA 2003 Taipei (Finalist for Best Video Award, September, 17th 2003)
- ⑦ Koji Ueda, Michele Guarnieri, Ryuichi Hodoshima, Fumihiko E. Fukushima, and Shigeo Hirose: Research on an arm-mounted crawler robot HELIOS IX: Adaptive behavior to the environment using sensors (2010) (Society of Instrument and Control Engineers Academic Encouragement Award, Technical Encouragement Award, February, 22nd 2011)
- ⑧ Shigeo Hirose and Paulo Debenest: Title of the Invention- Self-propelled Overhead Electric Wire Inspection Device (Tejima Research Award (Invention Award), Kenichi Iga, President, Tokyo Institute of Technology, February, 27th 2012)
- ⑨ Shigeo Hirose: Self-propelled portable earthquake motion simulator, Patent No. 2604112, (Invention Encouragement Award, Japan Institute of Invention and Innovation, Hotel Associa Shizuoka, November, 27th 2012)
-
Chapter 06
Find out more
Application to Earthquake and Disaster Preparedness -
Using the principle of the infinitely rotating robot VUTON, in collaboration with Hakusan Corporation, Hirose developed the earthquake zabuton, an omnidirectional vehicle capable of producing any earthquake motion. Previously, earthquake simulators faced issues, such as the need to prepare a huge earthquake generator, operational difficulties in bad weather, and limited width of motion, making it impossible for people to experience a large horizontal shaking earthquake. However, with the development of Earthquake Zabuton, it is now possible to reproduce the same large-amplitude horizontal shaking as an actual earthquake indoors, regardless of the weather. This allows people to experience what an earthquake would be like on a screen and in VR simultaneously and to learn about the relationship between shaking and damage. It is used for disaster preparedness activities in local communities. More than 30,000 people have experienced it so far, and it has been featured in many TV news programs as a new tool for disaster preparedness.
Publications and awards in this field
- ① Minoru Yoshida and Shigeo Hirose: Earthquake experience device using omnidirectional moving vehicle mechanism, Journal of the Japan Society of Mechanical Engineers, 114, 1111, pp. 448–449 (2011)
- ② Roh, S., Taguchi, Y., Nishida, Y., Yamaguchi, R., Fukuda, Y., Kuroda, S. and Hirose, S.: Development of the Portable Ground Motion Simulator of an Earthquake, Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 5339–5344 (2013)
- ③ Matsuura, D., Ishida, S., Akramin, M., Kucuktabak, E.B., Sugahara, Y., Tanaka, S., Fukuwa, N., Yoshida, M., Takeda, Y.: Conceptual Design of a Cable Driven Parallel Mechanism for Planar Earthquake Simulation, The 21st CISM-IFToMM Symposium Robot Design, Dynamics and Control (ROMANSY2016), Springer, pp. 403–411 (2016)
- ④ Shigeo Hirose: Invention Encouragement Award, Self-propelled portable earthquake motion simulator, patent 2604112, Japan Institute of Invention and Innovation, Hotel Associa Shizuoka (2012.11.27).
- ⑤ “Technology Award,” 2013, Japan Institute of Social Safety Science
- ⑥ Japan Resilience Awards 2016 “Excellence Award. ”
-
Chapter 07
Find out more
Research into New Robotic Elements -
The development of new robots cannot be achieved by simply combining existing elements. Hirose developed several new mechanical elements and sensors to meet these challenges and objectives.
These include a new vision sensor for stereo vision (notable invention in ① below), a magnetic adsorption unit for wall-climbing robots (notable invention in ② below), and an optical 6-axis force sensor (commercialized by Minebea in 2009).
A screw mechanism that can change its pitch in response to load (awards ③ and ④ below), car jack that can be utilized to save lives (award ⑤ below), arm that extends into rubble by pneumatic pressure for rescue (award ⑥ below), rotary load-sensitive stepless transmission (award ⑦ below), several robotic devices for lifesaving (award ⑧ below), grasping mechanism that can efficiently handle disk-shaped objects (award ⑨ below), moving mechanism for a window cleaning robot (award ⑩ below), and a propulsion mechanism for an underwater moving robot (award ⑪ below).Awards on this topic
- ① Shigeo Hirose: Selection of Noteworthy Inventions April, 19th 1990 (Signal Processing Method for Binocular Range Finder Device, Application Publication No. 63-26522)
- ② Shigeo Hirose: Selection of Noteworthy Inventions April, 12th 1993 (Magnetic adsorption-type wall-moving device, Application Publication No. 2-151584)
- ③ Shigeo Hirose and Kan Yoneda: Optical 6-axis force sensor and its nonlinear calibration, Journal of the Robotics Society of Japan, 8, 5, pp.523–532 (1990) (Advanced Automation Technology Promotion Foundation Advanced Automation Technology Promotion Award (main award) March, 4th 1994)
- ④ Shigeo Hirose, Craig Tibbetts, and Tetsuo Hagiwara: Development of X-Screw: A load-sensitive actuator incorporating variable transmission, Proc. ICRA, Detroit, pp.193–199 (1999) (FANUC FA Robot Foundation, Robot Technology Promotion Award, March, 10th 2000)
- ⑤ Shigeo Hirose: Rescue jack "Gareking," a device that can be utilized to save lives in the event of a disaster and in daily life (Good Design Award, October, 30th 2002)
- ⑥ Daisuke Mishima, Takeshi Aoki, and Shigeo Hirose: Development of a pneumatic drive expandable arm to inspect narrow environments. Proc. of SI2002 (Kobe), pp.49–50 (2002) (SI2002 Best Session Award, December, 21th 2002)
- ⑦ Tetsuo Hagiwara and Shigeo Hirose: Development of load-sensitive continuously variable rotary transmission. Part 2: Improvement of efficiency, Proc. Robotics and Mechatronics Conference '02, 2P2-H10 (1)–(2) (2002) (JSME Robotics and Mechatronics Division ROBOMEC Award, May, 24th 2003)
- ⑧ Shigeo Hirose: High Performance Material Group for Searching in Rubble and Lifesaving Operations (Special Prize, Fire and Disaster Management Agency Commissioner Keiji Araki, June, 27th 2008)
- ⑨ Gen Endo, Shigeo Hirose and Hiroya Yamada: Development of Disk-shaped Object Handling Gripper with Cylindrical Rotating Fingertips, SICE SI Division Conference (SI2009), Tokyo, pp.835–837 (2009) (Best Presentation Award, May, 17th 2010)
- ⑩ Noriaki Imaoka and Shigeo Hirose: Basic Study on the Mechanism of Window Cleaning Robot that can Overcome Window Frames, SICE SI Division Lecture Meeting (SI2009), pp.1839–1842 (2009) (Best Presentation Award, May, 17th 2010)
- ⑪ Huang, Ya-Wen, and Shigeo Hirose: Development of Tether Mooring Type Underwater Robots: Anchor Divers I and II, (International Conference on Underwater System Technology 2010 (USYS'10), Cyberjaya, Malaysia, Best Paper Award, November, 1st 2010)
-
Chapter 08
Find out more
New Design Principles -
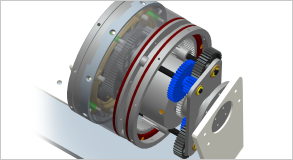
During his time at the Tokyo Institute of Technology, Hirose developed a total of 150 robots and proposed several basic principles of robot design. There have been theories of robot design in the past, but they were all too abstract to be useful in actual design. Hirose’s design principles, developed in the course of the actual design process, are remarkably practical and are still being introduced in lectures at conferences today. Typical examples are the principle of negative energy consumption prevention, connected differential mechanisms, and principle of interference drive. The details are described below.
(1) Principles of negative energy consumption prevention
This principle came from considering the gravitationally decoupled actuation (GDA), which was originally proposed to improve the energy efficiency of the legs of walking robots. Several kinetic systems are inefficient because of negative energy consumption, that is, energy is left to dissipate as heat; however, this design method attempts to improve the efficiency of mechanical systems through mechanisms and control methods to prevent this from occurring. This has enabled the development of an IB magnet that can detach a permanent magnet with zero force and a float-arm articulated arm.(2) Connected differential mechanisms
The basic principle of the coupled differential mechanism is a system in which the two energy ports of the differential mechanism are successively connected. Hirose pointed out that if ports are connected continuously, energy can be distributed to multiple ports without energy consumption, and various multi-degree-of-freedom mechanisms can be configured with this as a differential mechanism. The soft gripper mentioned in Section 2 is a typical example.(3) Principle of the interference drive
The interference drive is a mechanism in which a wire for driving a certain joint is wound on a pulley installed at the root node and transmitted to the drive system of the base section. The wire tension for driving the tip node is actively adjusted at the root node to efficiently generate the joint driving force. Hirose also identified the excellence of the driving principle of a biological drive system, as this type of structure is also utilized in the drive system of human finger joints. By applying the principle of interference drive, it is possible to move the tip of a telescopic cantilever arm that is more than 15 m long and suspends a 10 kg weight. He indicated that this drive principle can be applied to various fields other than wire-drive systems. The effectiveness of this principle has been demonstrated in combination with the differential mechanism in the robot arm called Raiden, which produces the effect of an interference drive and high payload, and by the effective use of the on-board actuator in the posture-variable crawler.
-

Chapter 09
Find out more
Creativity Education -
When Hirose worked at the Tokyo Institute of Technology, he taught design and drafting to third-year undergraduate students in the Department of Mechanical Sciences (now Department of Mechanical and Aerospace Engineering). He launched a course called “Machine Creation” to foster creativity, because simply trying to redesign existing equipment is not design in the true sense. In this course, students created computer-controlled robots to perform funny tricks for an audience (second-year students of the same department), and the grade was determined by how well each robot pleased the audience. This was later adopted as the main competition in the Robot Grand Prix, a robotics competition that he chaired in 1997 to commemorate the 100th anniversary of the Japan Society of Mechanical Engineers, which is now held nationwide.
At the time, there was insufficient space and equipment at the Tokyo Institute of Technology to conduct this kind of manufacturing education; therefore, he sought the cooperation of the university in fundraising and raised approximately 100 million yen to establish an educational space called the “Creative Workshop.” This facility is still in use and shared with the Department of Mechanical Engineering at the Tokyo Institute of Technology.
Hirose believes that it is too late to hone one's engineering sense after starting university education; thus, he holds an annual lecture and robot demonstration competition called “Advanced Robot World” for the general public. He is also the chairperson of the Children’s Challenge Contest sponsored by the Japan Institute for Promoting Invention and Innovation (JIII) and is making efforts for creativity education involving invention clubs across the country.
-

Chapter 10
Find out more
Proposals for a Future Robotic Society -
In Japan, the media has focused on research related to humanoid robots, but Hirose is working on developing robots that are class apart from science-fiction robots. He has highlighted misunderstandings in science fiction-like predictions of the future and ethical issues of anthropomorphic robots, such as Asimov's Three Laws of Robotics, and has continued to propose guidelines for developing robots that are truly useful in people's lives by harnessing their essential characteristics. For these activities, he received awards for the following two articles:
Awards on this topic
- ① Shigeo Hirose: New Code of Conduct for Robots, Robots (Japan Robot Association), 89, pp.99–105 (1992) (Best Paper Award, 20th Anniversary of Japan Industrial Robot Association, October, 16th 1992)
- ② Shigeo Hirose: The Road to an Ideal Robotic Society, Journal of the Robotics Society of Japan, 12, 3, pp. 345–351 (1994) (Best Paper Award in commemoration of the 10th anniversary of the Robotics Society of Japan, November, 12th 1993. This paper was published in the Journal of the Robotics Society of Japan after the award.)